First Brainstorming
By The Media team on October 6, 2016
Today we had our first official meeting! Exciting stuff.
For all you Protocopier enthusiasts out there, he is a short breakdown of what happened.
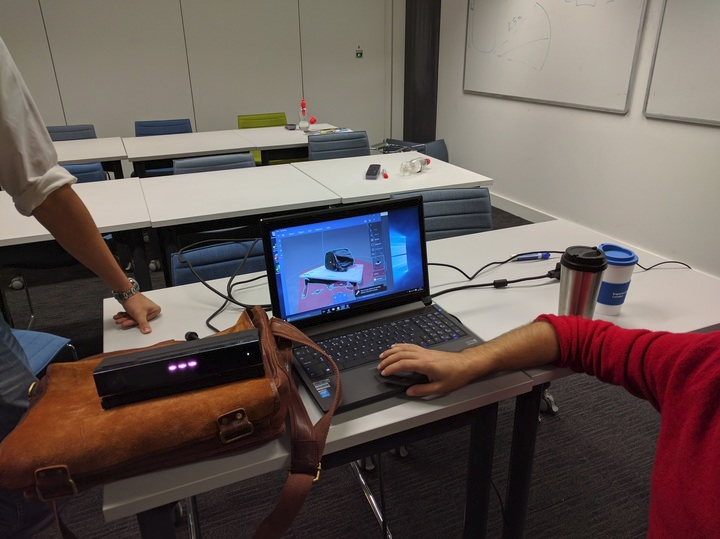
We met at 10:00am in the wonderful CDT space to put our heads together and think about the general approach we wanted to take.


As you can see, lot of whiteboards, lots of puzzled faces, lots of thinking.
The main problems we thought about were:
-
Is a rotating table with a fixed camera better? Or a free camera?
-
What conditions are best to maximise performance of fusion algorithm
-
Are there any external tools that could facilitate with the problem?
###Rotating Table or Fixed Camera
We came to the conclusion that both methods had their merits and demerits. Namely, out-the-box Kinect Fusion is designed to work for a moving camera, not moving objects. Therefore, we realised that for a rotating table system, the field of view (FOV) of the kinect would need to be kept entirely on the rotating frame of reference, to mimic the motion of a moving camera. We first stipulated that a moving camera design would hence be easier, that could perhaps have the kinect attached to a rail for sliding, or a pivoted about the object with some kind of mechanical design:
This was our first design sketch. But due to the minimum range of the Kinect V2, it would need to occupy a large circular operating area of at least a 1m diameter (actually slightly more to accommodate size of object). We were therefore not entirely satisfied with this design.
###Maximising Fusion Performance
We also noticed that during rotations around symmetrical objects, the fusion algorithm struggled to find useful landmarks for robust tracking, and as a result, produced messy or incomplete meshes for the objects:
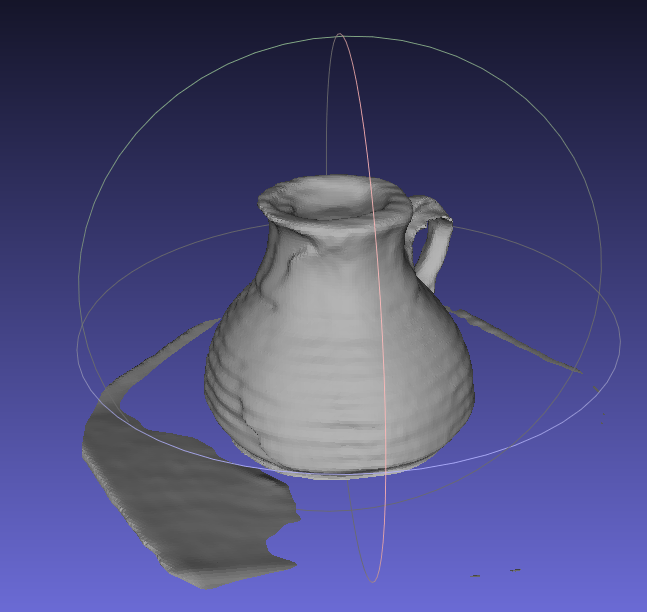
We therefore realised that it could be of benefit to add small 3D landmarks around the scanned object, to aid in the SLAM algorithm underlying Kinect Fusion. Simple tests with landmark objects improved performance of the out-the-box Fusion performance, Hurray!
###External Tools
After all of this playing around with the out-the-box Kinect Fusion, we realised that other software tools might be available to facilitate the scanning process. We came across a closed-source software package, entitled “NAME”, that seemed to provide more robust tracking and fusing. Most importantly, the 3D scans still performed well even with a simple rotating table, and .stl files could be generated directly, allowing simple interfacing for 3D printing. We therefore chose to use this software, with a turntable system being the dominant design, and a handheld option